Brain Control Analysis
Cognitive function is driven by dynamic interactions between large-scale neural circuits or networks, enabling behaviour. However, fundamental principles constraining these dynamic network processes have remained elusive. Here we use tools from control and network theories to offer a mechanistic explanation for how the brain moves between cognitive states and how we can intervene the transition with predictable design.
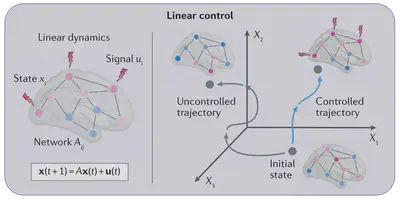
In network control, the system in question typically comprises a complex web of interacting components,
and the goal is to drive this networked system towards a desired state by influencing a select number of input nodes.
The starting point for most control-theoretic problems is the lineartime-invariant
control system

Shi Gu (顾实)
Tenured Associate Professor of Computer Science
My research interests include computational neuroscience and machine learning.